We present a new database supporting the development of impact-aware robotics, an emerging field of research focused on enabling robots to
exploit physical impacts with objects and environments to allow for dynamic manipulation and locomotion. This database allows getting access to
data that can be used to answer various research questions related to, e.g., motion planning, parameter identification, and object tracking. The
database can store a wide variety of datasets obtained from recordings of impact experiments. In these experiments, robots, objects, and
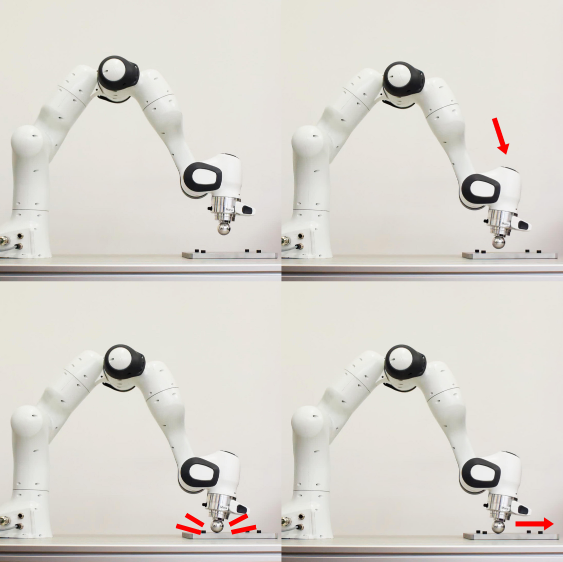
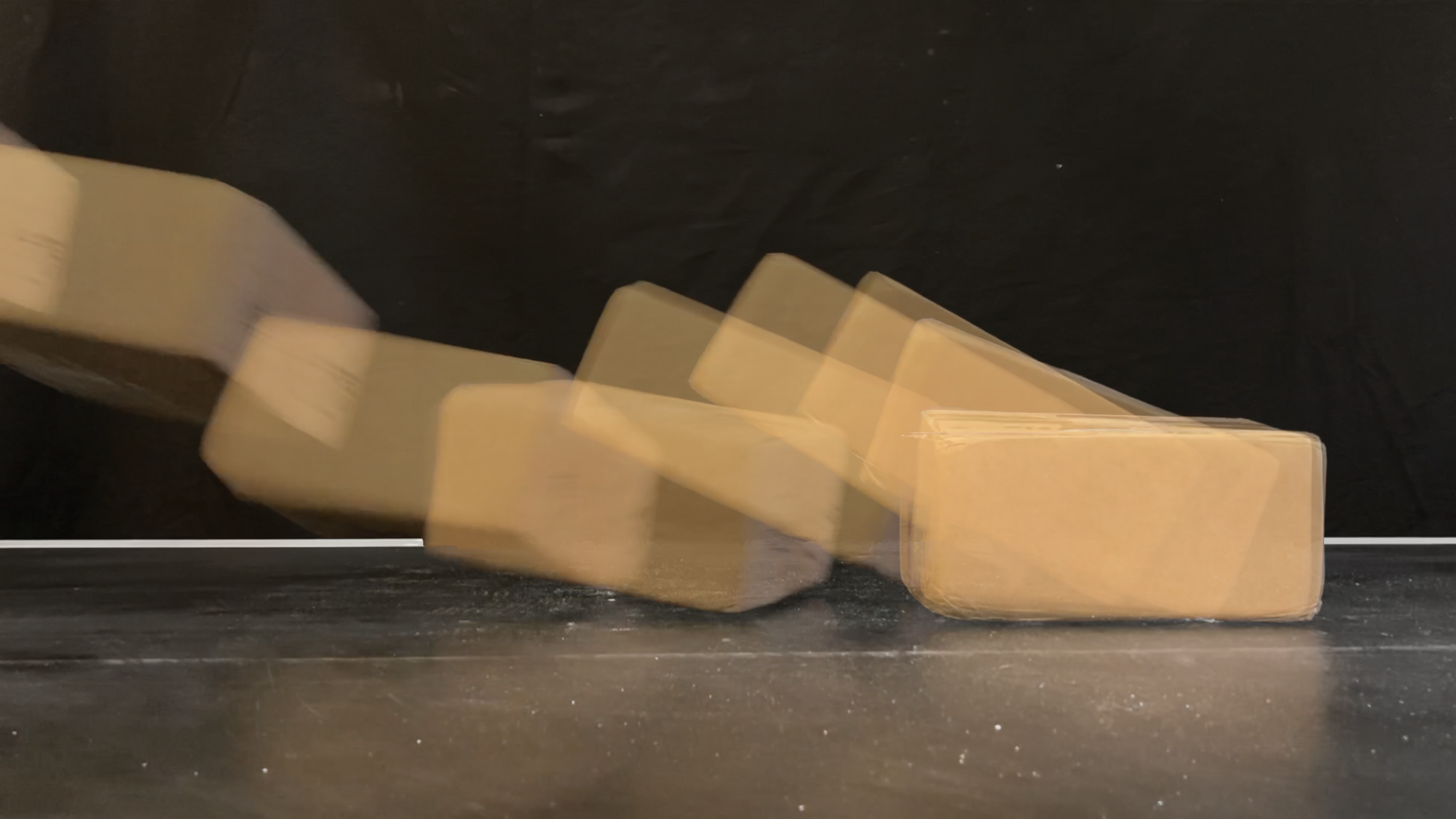
environments are used in the context of physical impacts to perform various robotic tasks, such as object tossing with robotic arms to speed up
throughput or drones impacting walls for inspection.
Publications
Citing the Impact-Aware Robotics Database
Please use the following citation when using the Impact-Aware Robotics Database:
@ARTICLE {2023_Jongeneel,
author = {M J Jongeneel and S Dingemans and A Saccon},
title = {The Impact-Aware Robotics Database: Supporting Research Targeting the Exploitation of Dynamic Contact Transitions},
journal = {Submitted to IEEE Robotics and Automation Letters (RA-L),
year = {2023},
url = {https://hal.science/hal-03900923},
month = {TBD}}